README
Nav2d
![]()
![]()
![]()
![]()
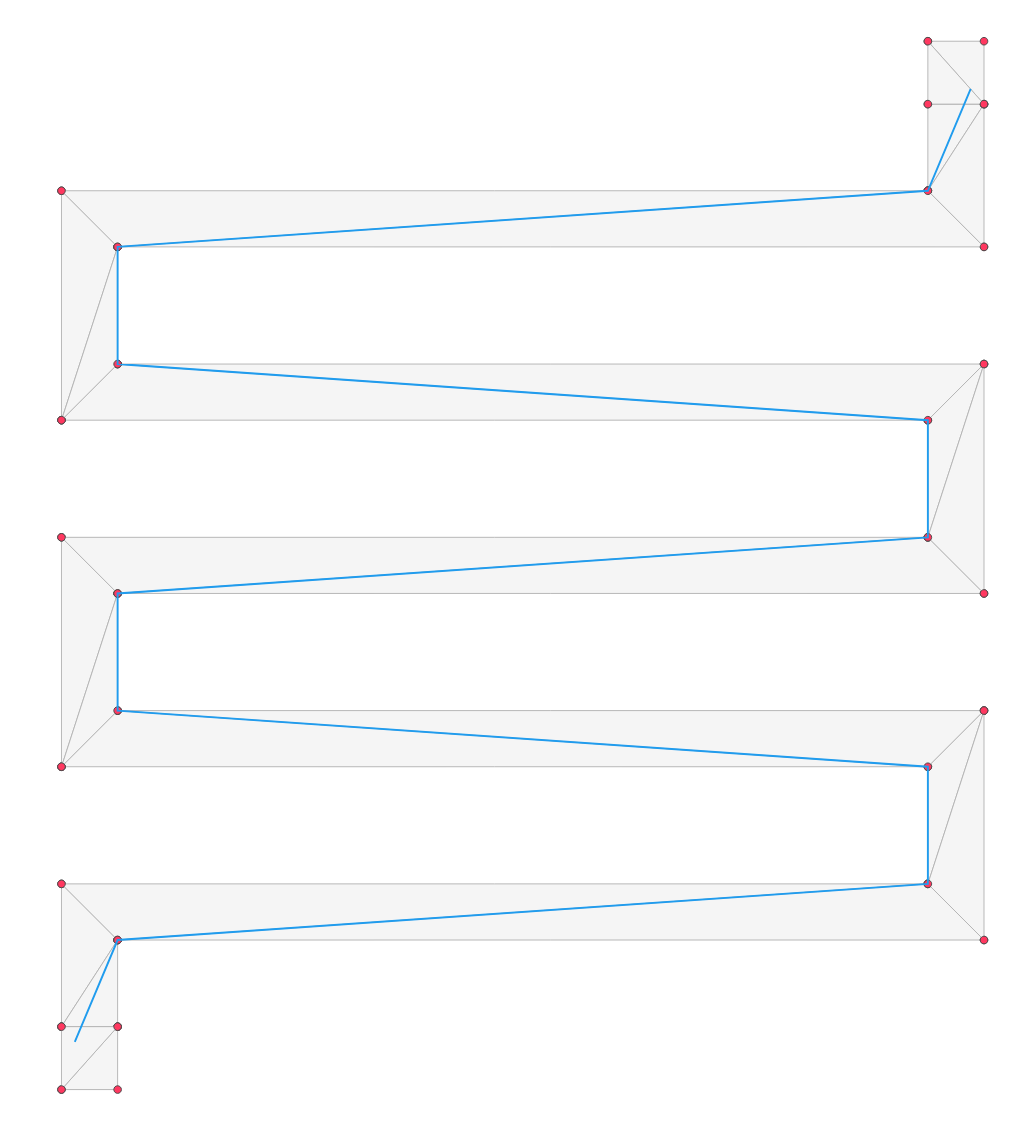
This is a high-quality implementation of a 2D polygonal navigation mesh with A* path finding and funneling (e.g. finding not only the mesh nodes but also the actual path across polygons).
Why this package
This package was created due to the lack of generic 2D navigation mesh packages able to handle polygonal nodes of any shape and integrating a robust funnel algorithm. Furthermore, some packages require specific file formats for the meshes, limiting the choices of editors.
This package aims to:
- Work on node and the browser.
- Provide robust and fast implementation of a generic polygonal navigation mesh with A* path finding and funneling.
- Provide a simple user interface:
- Accept multiple formats to specify points (for interoperability with other libraries).
- Accept any polygon (even convex and defined either in clockwise and counterclockwise order) and automatically triangulate.
- Automatic neighbor search means that only polygons are needed, the relations will be automatically computed (polygon with a shared edges are considered neighbors).
- All geometric operations and comparisons are tolerant to floating point errors.
- Support disconnected navigation meshes.
- Have good test coverage.
Install
There are multiple ways to install nav2d. If you are using npm,
and building your game with wepback, you can install and use the package
directly:
$ npm i nav2d
You can also directly include the library from the unpkg CDN into your page. There are two options here,
You can use the version containing only the code of this library (you'll have to include all dependencies yourself):
<script defer src="https://unpkg.com/nav2d/dist/nav2d.min.js"></script>You can use the
depsbundle, which ships together with all dependencies, for hassle free experience:<script defer src="https://unpkg.com/nav2d/dist/nav2d_deps.min.js"></script>
How to use
First create the navigation mesh, by passing an array of polygons, each polygon being an array of points. Polygons that are not triangles will be triangulated automatically.
import { NavMesh } from "nav2d";
const navmesh = new NavMesh([
[
[0, 0],
[0, 12],
[12, 0],
],
[
[12, 8],
[12, 4],
[16, 6],
],
[
[12, 0],
[6, 6],
[12, 6],
],
[
[100, 100],
[110, 100],
[100, 110],
[95, 107],
[105, 102],
],
]);
You can pass points as arrays [x, y], as objects {x:x, y:y} or
as Point(x, y) objects.
Warning: Instantiating the
NavMeshobject can be slow if you have a big mesh with lots of polygons, as the constructor has to triangulate the polygons and creates a neighbors cache to speed up neighbor lookup when searching. This is a one-time cost (e.g. theNavMeshclass is optimized to be instantiated once and use multiple times). Ballpark performance numbers are 1.5 seconds for 1000 polygons and 15 seconds for 10 000 polygons (linearly dependent on polygon count).
Now we can query paths:
const path = navmesh.findPath([1, 1], [14, 6]);
console.log(path); // -> [Point(1, 1), Point(14, 6)]
As you can see from the output, thanks to the funnel algorithm, the path will only
contain the necessary path points (in this case a straight line). If no path can be
found (disconnected islands or endpoints outside the mesh) null will be returned.
To find the path, a optimized A* implementation is used. You can override the default
the cost and heuristic functions (or only one of the two by passing null), by passing them to the
NavMesh constructor. For example, to implement a simpler breadth first search, we can do:
const costFunc = (polygon1, polygon2, portal) => 1;
const heuristicFunc = () => (polygon, to) => 0;
const navmesh = new NavMesh([...], costFunc, heuristicFunc);
// Use as before
Instead, to implement Dijkstra’s Algorithm, you can:
const heuristicFunc = () => (polygon, to) => 0;
const navmesh = new NavMesh(
[...],
null, // if null, the default will be used */
heuristicFunc
);
(Look here for an nice explanation of the algorithms above)
The cost function takes two neighboring polygons and a portal as parameters and
returns the cost to go from the first to the second. Both polygons are Polygon objects.
The portal is the edge shared between the two polygons.
The heuristic function takes two polygon: a polygon on the path and the final polygon,
and returns an estimation of the distance between the two. Both of these are Polygon objects.
Note: The default functions compute the distance between polygons using the
.centroidDistance()method (see below). This computes the Cartesian distance between the centroids.
This is basically it. This package does nothing more and nothing less.
The Editor
For those looking for an easy way to create, view and edit their navigation meshes, nav2d
comes with a simple mesh viewer and editor, where you can also test the path finding.
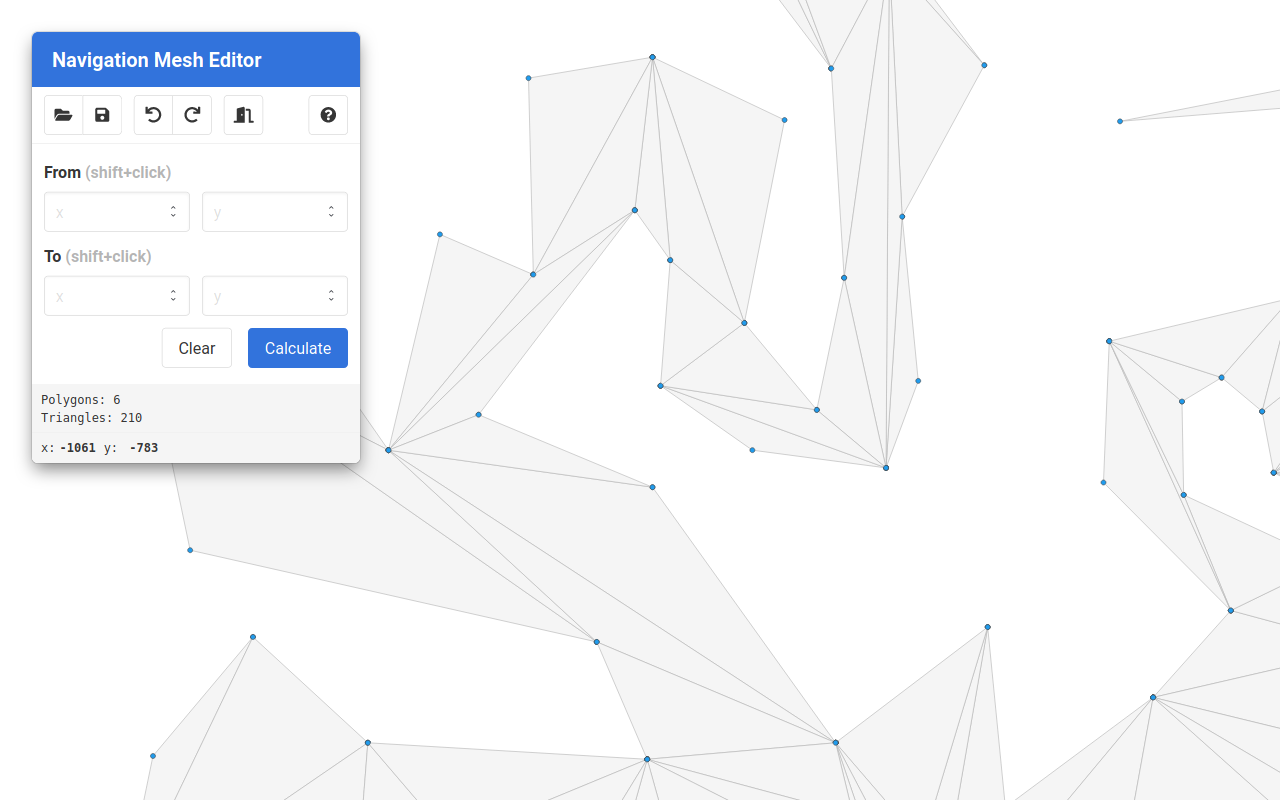
The editor lets you load, visualize and edit navigation meshes and then export the result. It also comes with built-in path finding, so that you can test your routes.
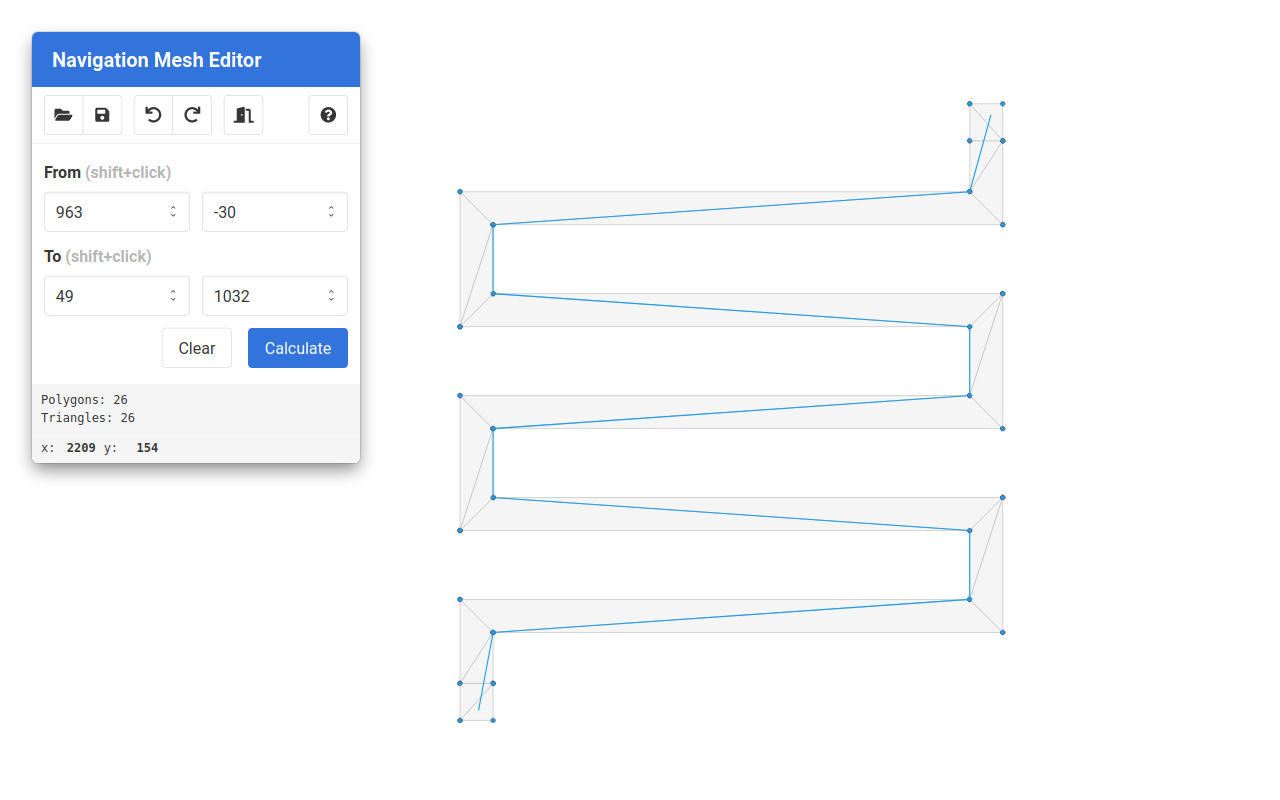
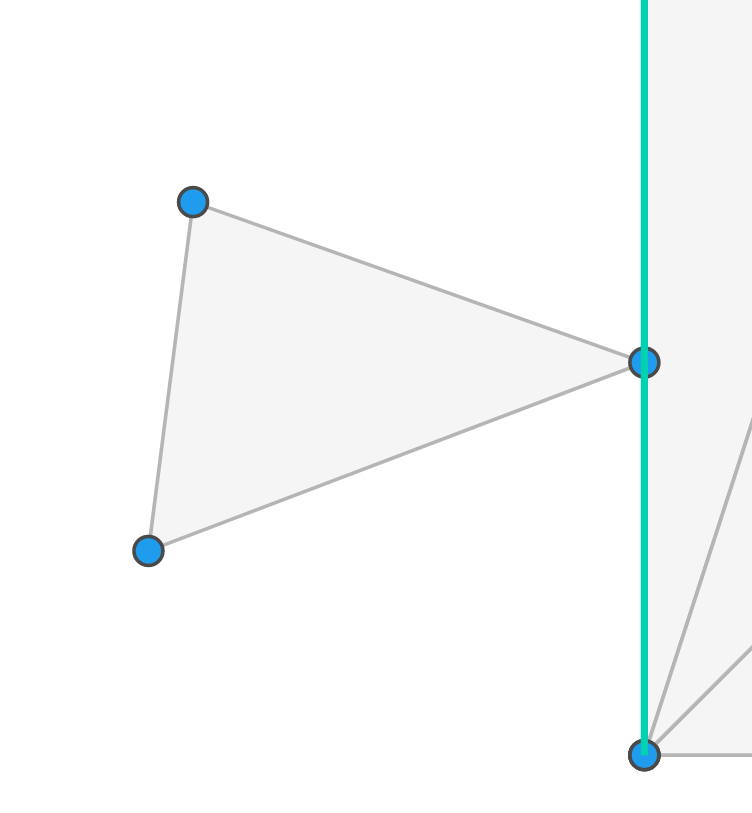
To help while editing, a powerful snapping feature is also included.
API Reference
Point or Vector (aliases)
Note: In all places where points are accepted,
nav2dalso accepts arrays[x, y]or{ x: x, y: y }objects.
Properties:
x- X coordinatey- Y coordinate
Methods:
Vector(x, y)- Construct vector or point.length()- Vector length.add(other)- Add vectors, return new vector.sub(other)- Subtract vectors, return new vector.mul(other)- Multiply vectors, return new vector.div(other)- Divide vectors, return new vector.equals(other)- Check for equality.angle(other)- Returns angle between vectors.counterclockwiseAngle(other)- Return angle between vectors, using the current vector as reference (can be negative).
Functions:
dot(a, b)- Dot product.cross(a, b)- Cross product.isclose(a, b)- Return true if the given floats are close to each other.clip(a, b, v)- Return true ifvis in the rangea,brange, the closest limit of the range otherwise.
Edge
Properties:
p1- First edge point.p2- Last edge point.
Methods:
Edge(points)- Construct edge object (like a string between 2 points).length()- Edge length.direction()- Vector fromp1top2.onEdge(ppoint)- Whetherpointis on the edge.parallel(otherEdge)- Whether the two edges are parallel (but might not be on the same line).collinear(otherEdge)- Whether the two edges are collinear (parallel and on same line but might not overlap).overlap(otherEdge)- Returns overlap between two edges, or null if they do not overlap (might be a null-length edge).equals(otherEdge)- Whether the two edges are the same (have the same endpoints, even if reversed).
Polygon
Properties:
points- Polygon points.bounds- Bounding box array:[minx, miny, maxx, maxy].
Methods:
Polygon(points)- Construct polygon object.boundsSize()- Bounding box array:[x, y, width, height].edges()- Edges of the polygon.centroid()- Polygon centroid.centroidDistance(otherPoly)- Distance from this polygon's centroid tootherPoly's.contains(point)- Whetherpointis contained in the polygon.onEdge(point)- Whetherpointis on an edge.touches(edge)- Whetheredgetouches but doesn't intersect the polygon.
NavMesh
Properties:
polygons- Triangulated mesh polygons (triangles).pointQuerySize- Square edge size to use to query theNavMesquad tree when checking for point to mesh intersection. This should be much smaller than the average triangle size in the mesh, and can freely be set according to your navigation mesh scale. Defaults to 0.01.
Methods:
NavMesh(polygons, costFunc = null, heuristicFunc = null)- Construct navigation mesh.findPath(from, to)- Find path fromfrompoint totopoint. Returns a list of points, or null if not found.
Changelog
See here.